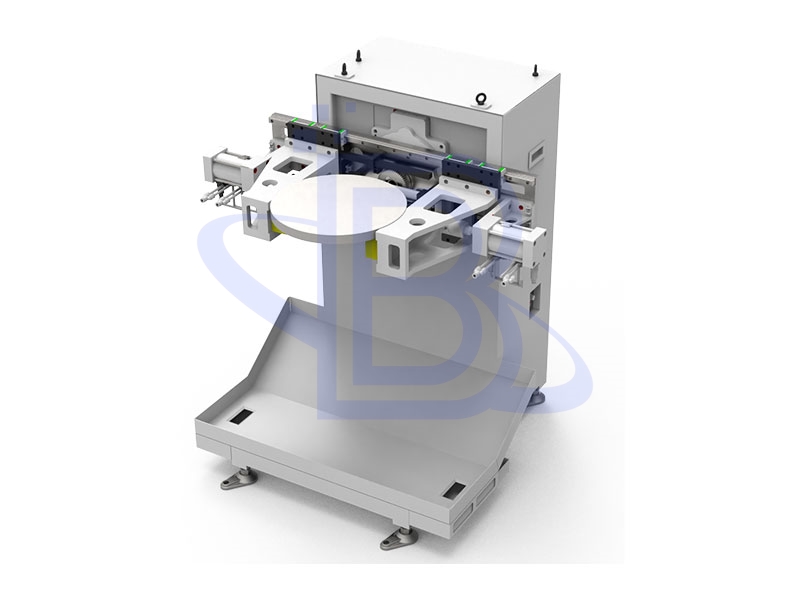
1.翻转原理:产品放置于定位台面→检测到物料,伸缩气缸夹紧→电机收到伸缩气缸夹紧到位信号,翻转→机器人收到翻转到位信号,取走物料
2.装置的夹紧与翻转通过直线导轨和齿轮齿条进行导向,可保证升降的精准度和流畅度。
3.产品OP10加工完成之后在此处进行翻转,供后续OP20的加工工作。
Copyright © 2026 宁波宝铂智能装备有限公司 版权所有
浙ICP备17057282号-2
朱经理
86-139-8933-7302